|
|
 HOME PAGE
HOME PAGE PIXIE
PIXIE DASH FREE
DASH FREEThese are photos and details of mice that I saw at the Electronic Design Show recently. Please excuse any errors.
This is Chris Pickering's Mouseratti. This has run times under 5 seconds in the school's standard class. It is currently detuned for exhibition purposes but is still pretty quick!
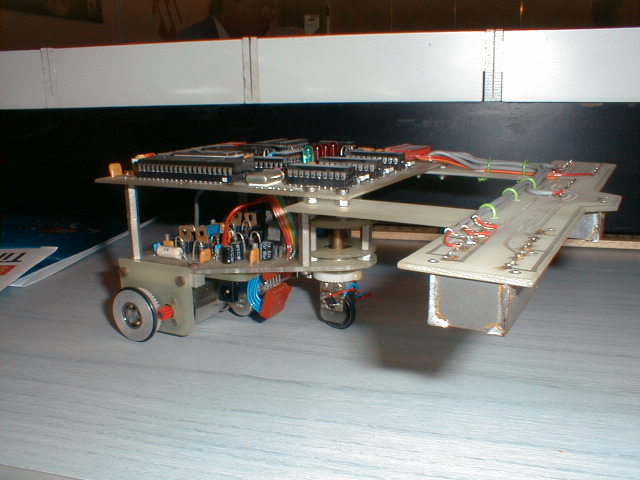
This is a big Meccano-based mouse that was on display at the EDS show at the NEC. It is reliable but slow(ish) (everything is relative!). I think it was built at Woodroffe school.
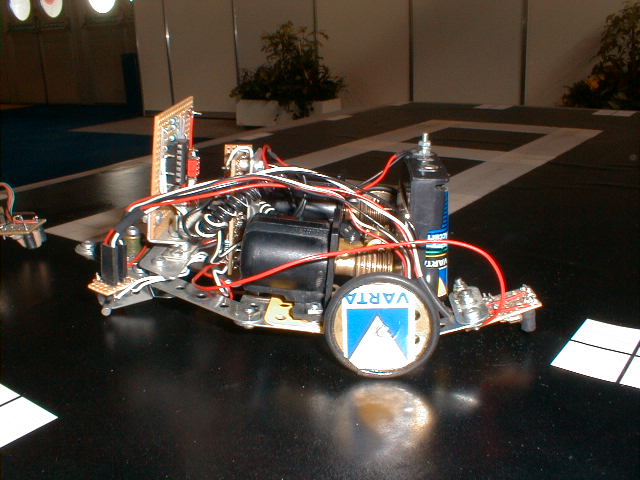
This is John Pickering's Drive-by-Wire. This is a tiny mouse that ran at the EDS show. It was good enough to scare us into some rapid development at the competition.!
The design is simple but certainly not crude. The "intelligence" is supplied by two microswitches. These are operated by the long, critically-shaped feeler wire via a cam. There is an additional contact made between the feeler and an adjustable wire to give zero-hysteresis switching for following the wall during a cell. The microswitches deal with the rapid turns needed at corners.
The wheels are taken from a slot-car racer and are very grippy.
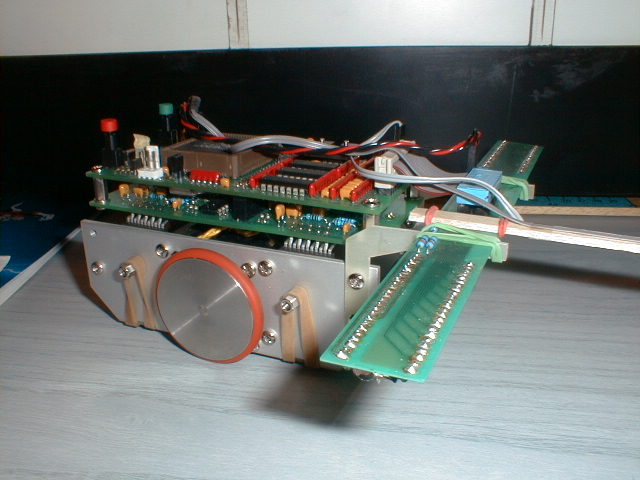
This is Swallow Systems' DOT. Somewhat quicker than a DASH, it won the wall-following competition at the Electronic Design Solutions show. It uses one of our drive trains, three Hamamatsu sensors (two area-coverage versions, one single-LED version), and an AVR 2313 processor. The motor speed setting is done with an array of trimmers and it uses a relay to reverse the right-hand motor when necessary. There is a power FET across the left-hand motor for braking.
The software is very crude; all it does is read the three sensor inputs, look up which trimmers to select and whether to reverse the motor or apply a brake. There are about 30 lines of code.
The limiting factor on performance is, as ever, tyre grip and braking.
The system is run from 5 AAA NiCds.
These are two of Dave Woodfield's mice. One is Voyager and the other is Enterprise. I am not sure which is which but I think the bottom one is Enterprise.
The top one has about 500 hours work in it; no wonder that Dave is probably the most successful mouse builder in Britain. It has very powerful stepper motors. He told me that they cost him about £80 each. The top board has an FPGA to control the steppers and the bottom board has the processor for maze-solving etc.
The lower picture shows one of his tricycle mice. One of the problems that everyone has with this style of mouse is moving the steering quickly enough. Many mice use radio control servos for steering but the faster competitors use very special servos or modify them to give much quicker response. When I checked with our local model shop, I found that these type of servos take about 100ms to turn 60 degrees. At nationally competitive speeds of 1 metre/sec that corresponds to 10 centimetres! This is a big problem when the gap you are aiming at is only 16 centimetres wide.