 HOME PAGE
HOME PAGE PIXIE
PIXIE DASH FREE 99
DASH FREE 99Sorry that this takes so long to download. I have put some high resolution photos on here for the technical to pore over.
I apologise for any errors and omissions. There are several mice I didn't get photos of and people I didn't get to talk to. This is very much a personal view of what happened.
We arrived at about 9 and parked within a few yards of the venue. There was a large room for the pits and another one for the maze. All the facilities were close together and there were plenty of power sockets. There was a continuous supply of coffee, tea and biscuits throughout the day.
The maze was already set up but the students had spent a happy time building what they considered to be a really horrible maze. There were lots of cells with no walls and long zig-zag sections. Fortunately the mazes for the heats and final were more reasonable!
All our mice survived the journey. We had my DASH2a Creag and Steve's HORSEPOWER, All of us' DOT and my new CYCLOPS. A quick test in the maze and we were settled.
There were lots of mice. There were old and new mice from established competitors. Nick Smith had probably the oldest mouse with Sterling Mouse from 1980. He also had a new mouse for this year with Michael Shuhmouser.
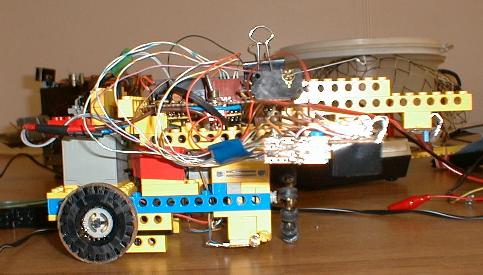
Michael Shuhmouser
This mouse uses Lego, Hamamatsu sensors and one of the popular Dallas micros. The most interesting feature is the front wheel. If you look carefully, you will see that the wheel has smaller wheels set around its periphery. When the mouse runs straight these little wheels spin to give low friction. The big wheel turns to give steering. When it turns the little wheels give "sideways" grip so that the steering works. The two rear wheels are driven through a differential made from Lego parts.
Nick won the prize for innovation for this mouse. It was capable and solved the mazes but the power to weight ratio will always limit the performance compared to mice built from custom components.
There were several unfinished mice that came along.
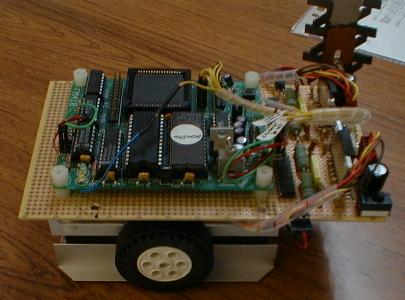
Edgar Mouse
Edgar Mouse is nearly complete but lacks sensors. Peter Harrison who built it has lots of advice on his web pages. Peter told me about his sensors at the D&T show and made me think about reflected light position sensors. I designed and built such a sensor and used it in Cyclops with moderate results.
There were a couple of interesting chassis. One I promised not to reveal the details of had an interesting technique to minimise the effects of weight transfer during acceleration and braking. I hope to see it in a complete mouse for next time.
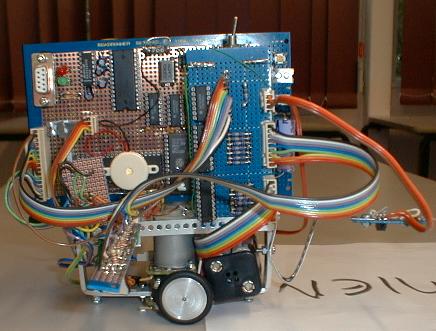
The other one has three driven pairs of wheels all of which are steered. Here are some pictures:-

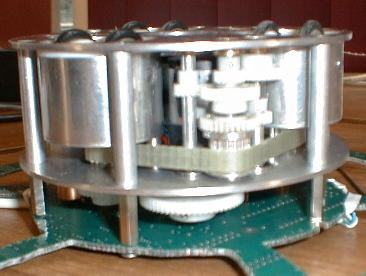
It is in the early stages and as yet has no processor, no sensors and no name.
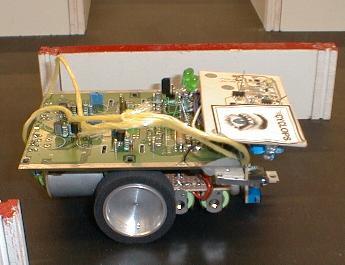
Ken Warwick brought along Busy Lizzie and his latest, Millennium Bug. This uses modified radio control servos for drive and steering. The drive servos have been modified for continuous rotation and the gearboxes have been modified to increase the speed. I was surprised at how fast it went with small wheels. When I tried modified servos, I only got about 10cm/sec with 75mm diameter wheels. I must have a go at modifying the servo gearboxes.
The other interesting thing for mouse builders to note is that the servo for steering is geared-up to make it steer quicker.
In the wall-follower class there were a couple of entries from the students at Royal Holloway.
Damien uses our drive train and a LOT of electronics. Unfortunately it didn't perform well on the day. Apparently it is called Damien because it draws 666mA!
My Cyclops ran quite well but needed a touch or two during heats. It was beaten by some seconds by both HORSEPOWER and DOT.
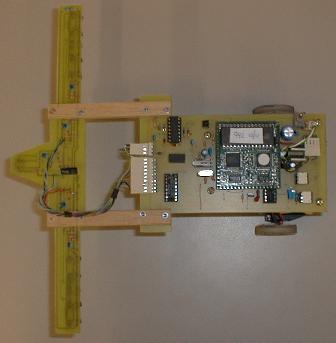
Cyclops started as a PIXIE printed circuit board. I replaced the 8031 with an Atmel 8515 AVR. (They are virtually pin-compatible if you leave the reset circuit off. It has PIXIE motor drive electronics and position/speed sensing. The wheels are turned from solid aluminium bar and the tyres are modified from model racing car tyres.

It has a Hamamatsu sensor pointing horizontally to detect right turns. The main sensor is a home-brew reflected light intensity sensor. This type of sensor appealed to me for a long time but suffered from the problem of direct reflections from the walls when the sensor is at right angles to them. For a long time, I thought this made them impractical as the sensor would be at the wrong angle at some time as the mouse ran. After a couple of years, I realised that there is a very simple solution:- the sensor should aim slightly downwards. You can rely on the walls being vertical, so the mirror reflection can be guaranteed to fall below the sensor! Shame it took so long to see such an obvious solution.
The string is the "lifting hook" to allow it to be recovered from the centre of the maze. On the subject of this, Steve recovered HORSEPOWER from the maze using a "hooky stick" and dropped it! Fortunately there was plenty of time to glue the front sensor back on before the finals. Now Creag and Steve have both dropped mice during competitions it must be my turn next.
I have rambled on enough now. If you want any further details please e-mail me.